Robust Curb and Ramp Detection for Safe Parking Using the Canesta TOF Camera
Orazio Gallo, Roberto Manduchi, and Abbas Rafii.
 Abstract
Abstract
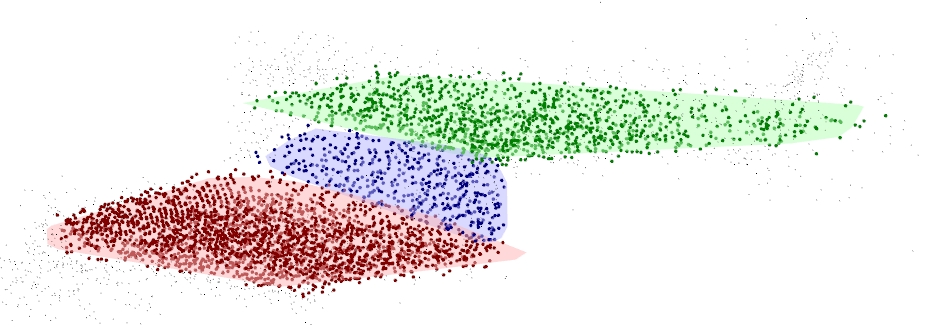
Range sensors for assisted backup and parking have potential for saving human lives and for facilitating parking in challenging situations. However, important features such as curbs and ramps are difficult to detect using ultrasonic or microwave sensors. TOF imaging range sensors may be used successfully for this purpose. In this paper we present a study concerning the use of the Canesta TOF camera for recognition of curbs and ramps. Our approach is based on the detection of individual planar patches using CC-RANSAC, a modified version of the classic RANSAC robust regression algorithm. Whereas RANSAC uses the whole set of inliers to evaluate the fitness of a candidate plane, CC-RANSAC only considers the largest connected components of inliers. We provide experimental evidence that CC-RANSAC provides a more accurate estimation of the dominant plane than RANSAC with a smaller number of iterations.
Publications:
- O. Gallo, R. Manduchi, and A. Rafii CC-RANSAC: Fitting Planes in the Presence of Multiple Surfaces in Range Data, Pattern Recognition Letters, 2011. (pdf) (bibtex)
- O. Gallo, R. Manduchi, and A. Rafii Robust Curb and Ramp Detection for Safe Parking Using the Canesta TOF Camera, IEEE Workshop on Time-of-Flight-based Computer Vision, CVPR, 2008. (pdf) (poster) (bibtex)
bibtex:
@article{GalloPRL11,
title={{CC-RANSAC:} Fitting planes in the presence of multiple surfaces in range data},
author={Gallo, O. and Manduchi, R. and Rafii, A.},
journal={Pattern Recognition Letters},
issn={0167-8655},
year={2011},
publisher={Elsevier}
}
@article{GalloCVPR08,
title = {Robust curb and ramp detection for safe parking using the Canesta TOF camera},
author = {Gallo, O. and Manduchi, R. and Rafii, A.},
journal = {Computer Vision and Pattern Recognition Workshops, 2008. CVPR Workshops 2008. IEEE Computer Society Conference on},
year = {2008}
}
last updated 02-23-2011