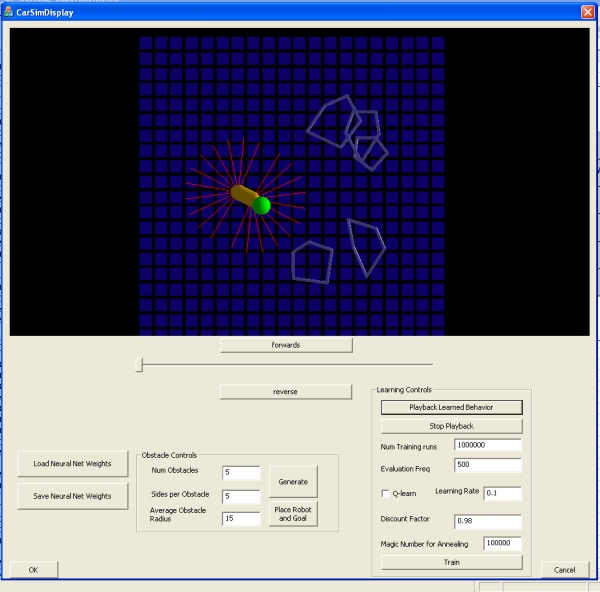
Neural network training of an obstacle avoiding robot in simulation
Note, in order to run this, you need a copy of MFC71.dll and MRC71R.dll.
See the microsoft notes on distributing these files
You can download these files here (for mfc71.dll) and here (for msvcr71.dll).
I think you need to put them in the same directory as the exe, but if you
are sufficiently familiar with windows to do the "registering dlls" dance, then that might work too.
As a demo, you can download both
- the executable (Just a warning, since it is a windows executable, be sure to virus scan it. I would not intentionally put a virus on the web, but if one slipped past my virus scanner it could easily infect every .exe file I build)
- A sample other learned net.
- The best neural net so far.
- 3 million training episodes, hardest obstacle configuration Set the discount factor incorrectly on this one so the robot sometimes just wanders off into nowhere-land.
And the project report
- as a gzipped postscript file
- as a Microsoft Word document
If you are interested in this visualization, you might also want to see
Visualization of neural network learning.
Or you might want to look at my templatized neural ne
twork code. Though I would reccomend, if you are writing your own
neural network classes, not using templates. Any possible speed
benefit derived from templatized neural network classes is probably
not worth the restriction of having to re-compile in order to change
network topology.
mds at es oh ee dot you see es see dot eee dee you